
Page 203 - Robot Builder's Bonanza
P. 203
172 BUILDING BOTS FROM FOUND PARTS
The basic idea behind the no- cut is to use base materials that are already the proper size
and shape. The parts of the robot— the motors, sensors, batteries, and so forth— can then be
attached using fasteners, glue, hook- and- loop, double- sided foam tape, tie- wraps, or other
techniques.
A prime source for materials for no- cut bases is the hardware store, but other outlets
shouldn’t be ignored. Keep your eyes open, and you’ll note many ready- made components
that can be used, without any additional sawing or sanding, for a robot base. Following is an
example of a no- cut mobile robot design using commonly available (and inexpensively priced)
metal pieces.
INTRODUCING THE MINI T- BOT
The Mini T- bot is made from a 6″ strapping T (or tee), commonly used in lashing together
pieces of lumber in a home. Strapping Ts are available in numerous sizes; the 6″ size is the
smallest that I’ve been able to locate, but they are also available up to 16″. The size measures
the top of the T; the vertical portion of the T is in various lengths, depending on the design.
One popular strapping T is the Simpson Strong- Tie T Strap. The brand doesn’t matter;
anything similar will do. The Mini T- bot uses the Simpson 66T, made of 14- gauge galvanized
steel, and it measures 6″ 5″, with a strap width of 1-1/2″. The 66T, like most strapping Ts,
has holes in it for nailing. The holes are offset and most will not line up with hardware you
want to hang on your robot. You’ll need to drill new holes. A power drill or, better yet, a drill
press is recommended for drilling the holes.
MAKING THE MINI T- BOT
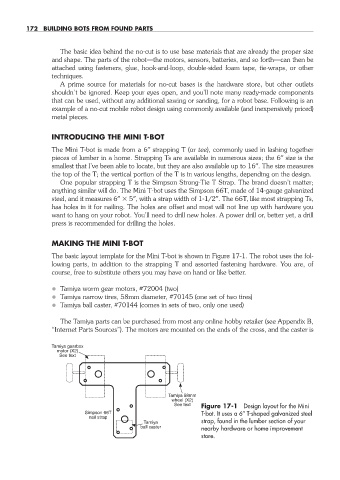
The basic layout template for the Mini T- bot is shown in Figure 17-1. The robot uses the fol-
lowing parts, in addition to the strapping T and assorted fastening hardware. You are, of
course, free to substitute others you may have on hand or like better.
• Tamiya worm gear motors, #72004 (two)
• Tamiya narrow tires, 58mm diameter, #70145 (one set of two tires)
• Tamiya ball caster, #70144 (comes in sets of two, only one used)
The Tamiya parts can be purchased from most any online hobby retailer (see Appendix B,
“Internet Parts Sources”). The motors are mounted on the ends of the cross, and the caster is
Tamiya gearbox
motor (X2)
See text
Tamiya 58mm
wheel (X2)
See text Figure 17-1 Design layout for the Mini
Simpson 66T T- bot. It uses a 6″ T- shaped galvanized steel
nail strap
Tamiya strap, found in the lumber section of your
ball caster nearby hardware or home improvement
store.
17-chapter-17.indd 172 4/21/11 11:49 AM