
Page 338 - Robot Builder's Bonanza
P. 338
BUILDING 4WD ROBOTS 307
Alas, 4WD robots are a bit harder to construct, and, depending on how they’re designed,
they cost more. But the advantages of a 4WD base often outweigh the disadvantages of a
higher price tag and extra time in the shop.
What applies to the typical 4WD robot also applies to those using six (or more) wheels. As you
G add drive wheels, the complexity, weight, and cost of the robot can skyrocket. You might
consider instead a tracked base, which functions like a multi- wheel- drive system, with an infinite
number of wheels. See the following section for more on robots that use tracks.
SEPARATE MOTORS OR LINKED DRIVE?
While there are four- wheel- drive systems where two of the wheels are unpowered, in the
typical 4WD all four wheels provide oomph to the robot. That means you either must use
separate motors for each wheel or somehow link the wheels together so they’re driven by the
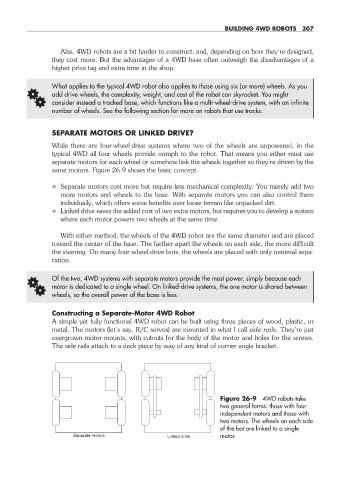
same motors. Figure 26- 9 shows the basic concept.
• Separate motors cost more but require less mechanical complexity. You merely add two
more motors and wheels to the base. With separate motors you can also control them
individually, which offers some benefits over loose terrain like unpacked dirt.
• Linked drive saves the added cost of two extra motors, but requires you to develop a system
where each motor powers two wheels at the same time.
With either method, the wheels of the 4WD robot are the same diameter and are placed
toward the center of the base. The farther apart the wheels on each side, the more difficult
the steering. On many four- wheel- drive bots, the wheels are placed with only minimal sepa-
ration.
G Of the two, 4WD systems with separate motors provide the most power, simply because each
motor is dedicated to a single wheel. On linked- drive systems, the one motor is shared between
wheels, so the overall power of the base is less.
Constructing a Separate- Motor 4WD Robot
A simple yet fully functional 4WD robot can be built using three pieces of wood, plastic, or
metal. The motors (let’s say, R/C servos) are mounted in what I call side rails. They’re just
overgrown motor mounts, with cutouts for the body of the motor and holes for the screws.
The side rails attach to a deck piece by way of any kind of corner angle bracket.
Figure 26- 9 4WD robots take
two general forms: those with four
independent motors and those with
two motors. The wheels on each side
of the bot are linked to a single
Separate motors Linked drive motor.
26-chapter-26.indd 307 4/21/11 11:52 AM