
Page 117 -
P. 117
98 Introduction to Control Theory
Then, let us find the controllability matrix of Σ -
(2.11.7)
Therefore, rankC=rank , and controllability is therefore preserved under
state-space transformation.
By combining the concepts of observability and controllability, we can
design compensators that solve the Linear Control Design problem. In fact,
the following theorem summarizes linear control design.
THEOREM 2.11–4: The Linear Control Design problem is solvable for a
system 2.11.1, if and only if the state-space realization is both observable
and controllable.
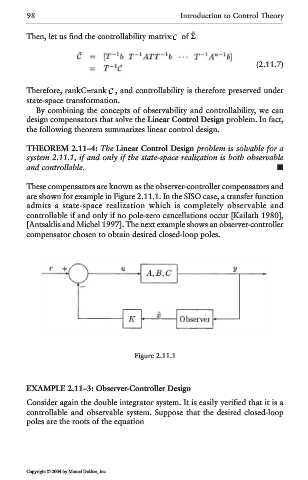
These compensators are known as the observer-controller compensators and
are shown for example in Figure 2.11.1. In the SISO case, a transfer function
admits a state-space realization which is completely observable and
controllable if and only if no pole-zero cancellations occur [Kailath 1980],
[Antsaklis and Michel 1997]. The next example shows an observer-controller
compensator chosen to obtain desired closed-loop poles.
Figure 2.11.1
EXAMPLE 2.11–3: Observer-Controller Design
Consider again the double integrator system. It is easily verified that it is a
controllable and observable system. Suppose that the desired closed-loop
poles are the roots of the equation
Copyright © 2004 by Marcel Dekker, Inc.