
Page 308 -
P. 308
5.3 Nonlinear Controllers 293
5.3 Nonlinear Controllers
There is a class of robot controllers that are not computed-torque-like
controllers. These controllers are obtained directly from the robot equations
without using the feedback-linearization procedure. Instead, these controller
may rely on other properties of the robot (such as the passivity of its Lagrange-
Euler description) or may be obtained without even considering the physics
of the robot. In general, these controllers may be written as a computed-
torque controller with an auxiliary, nonlinear controller added to it. The
nonlinear control term introduces coupling between the different joints
independently from the computed-torque term. In other words, even if the
computed-torque controller is a simple PID, the nonlinear term couples all
joints together as will be seen in Theorems 5.3.4 and 5.3.5, for example.
Direct Passive Controllers
First, we present controllers that rely directly on the passive structure
of rigid robots as described in equations (5.1.1), where (q)-2V m (q, )
is skew symmetric by an appropriate choice of V m (q, ) as described in
Section 3.3.
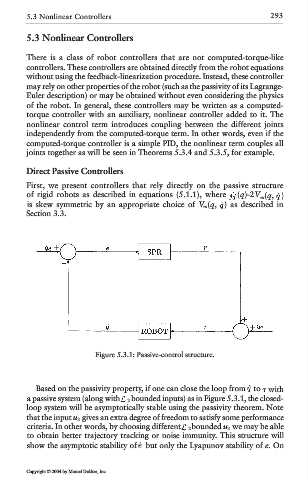
Figure 5.3.1: Passive-control structure.
Based on the passivity property, if one can close the loop from to with
a passive system (along with bounded inputs) as in Figure 5.3.1, the closed-
2
loop system will be asymptotically stable using the passivity theorem. Note
that the input u 2 gives an extra degree of freedom to satisfy some performance
criteria. In other words, by choosing different 2 bounded u 2 we may be able
to obtain better trajectory tracking or noise immunity. This structure will
show the asymptotic stability of but only the Lyapunov stability of e. On
Copyright © 2004 by Marcel Dekker, Inc.