
Page 46 -
P. 46
2.2 Linear State-Variable Systems 27
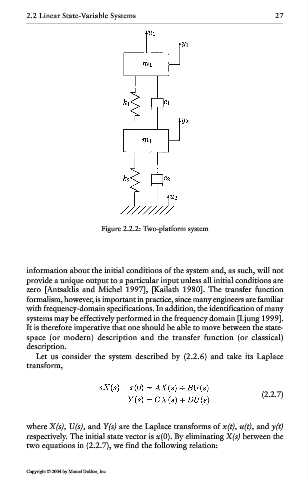
Figure 2.2.2: Two-platform system
information about the initial conditions of the system and, as such, will not
provide a unique output to a particular input unless all initial conditions are
zero [Antsaklis and Michel 1997], [Kailath 1980]. The transfer function
formalism, however, is important in practice, since many engineers are familiar
with frequency-domain specifications. In addition, the identification of many
systems may be effectively performed in the frequency domain [Ljung 1999].
It is therefore imperative that one should be able to move between the state-
space (or modern) description and the transfer function (or classical)
description.
Let us consider the system described by (2.2.6) and take its Laplace
transform,
(2.2.7)
where X(s), U(s), and Y(s) are the Laplace transforms of x(t), u(t), and y(t)
respectively. The initial state vector is x(0). By eliminating X(s) between the
two equations in (2.2.7), we find the following relation:
Copyright © 2004 by Marcel Dekker, Inc.