
Page 20 - Robot Builders Source Book - Gordon McComb
P. 20
1.2 Definition of Levels or Kinds of Robots 9
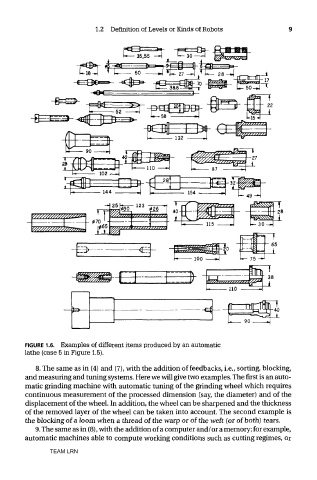
FIGURE 1.6. Examples of different items produced by an automatic
lathe (case 5 in Figure 1.5).
8. The same as in (4) and (7), with the addition of feedbacks, i.e., sorting, blocking,
and measuring and tuning systems. Here we will give two examples. The first is an auto-
matic grinding machine with automatic tuning of the grinding wheel which requires
continuous measurement of the processed dimension (say, the diameter) and of the
displacement of the wheel. In addition, the wheel can be sharpened and the thickness
of the removed layer of the wheel can be taken into account. The second example is
the blocking of a loom when a thread of the warp or of the weft (or of both) tears.
9. The same as in (8), with the addition of a computer and/or a memory; for example,
automatic machines able to compute working conditions such as cutting regimes, or
TEAM LRN