
Page 21 - Robot Builders Source Book - Gordon McComb
P. 21
10 Introduction: Brief Historical Review and Main Definitions
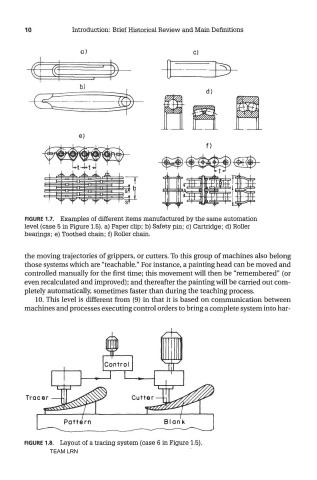
FIGURE 1.7. Examples of different items manufactured by the same automation
level (case 5 in Figure 1.5). a) Paper clip; b) Safety pin; c) Cartridge; d) Roller
bearings; e) Toothed chain; f) Roller chain.
the moving trajectories of grippers, or cutters. To this group of machines also belong
those systems which are "teachable." For instance, a painting head can be moved and
controlled manually for the first time; this movement will then be "remembered" (or
even recalculated and improved); and thereafter the painting will be carried out com-
pletely automatically, sometimes faster than during the teaching process.
10. This level is different from (9) in that it is based on communication between
machines and processes executing control orders to bring a complete system into har-
FIGURE 1.8. Layout of a tracing system (case 6 in Figure 1.5).
TEAM LRN