
Page 303 - Robots Androids and Animatrons : 12 Incredible Projects You Can Build
P. 303
The most widely used industrial robot is the robotic arm. Robotic
arms are extremely versatile, due to the fact that the end manip-
ulator of a robotic arm can be changed to fit particular tasks or
industries. For instance, welding gear manipulators are used in
spot-welding robots, spray nozzles for spray painting parts and
assemblies, and grippers for pick and place, to name a few.
So you see, robotic arms are useful and make for an ideal learning
tool. However, building a robotic arm from scratch is a difficult
task. It is far easier to assemble a robotic arm from a kit. OWI sells
a suitable robotic arm kit available from a number of electronic
distributors (see the parts listing at the end of the chapter). The
interface connects the finished robotic arm kit to a host computer
printer port. The host computer is any IBM PC or compatible com-
puter capable of running DOS or Windows 95/98.
Once connected to the computer’s printer port, the robotic arm
may be operated interactively and programmed from the com-
puter. Operating the robotic arm interactively is easy. Simply click
on any function button to command the robotic arm to perform that
function. Click on the button a second time to end the function.
Programming automation is just as easy. First click on the Program
282 button to enter the program mode. In this mode, the interface and
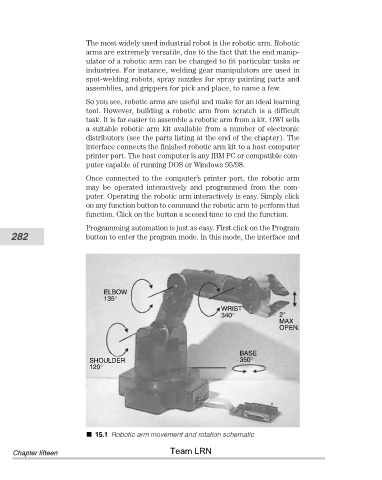
ELBOW
135°
WRIST
340° 2"
MAX
OPEN.
BASE
SHOULDER 350°
120°
15.1 Robotic arm movement and rotation schematic
Team LRN
Chapter fifteen