
Page 356 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 356
CHAP. 61 FOURIER ANALYSIS OF DISCRETE-TIME SIGNALS AND SYSTEMS
s-plane z-plane
I U~I circle
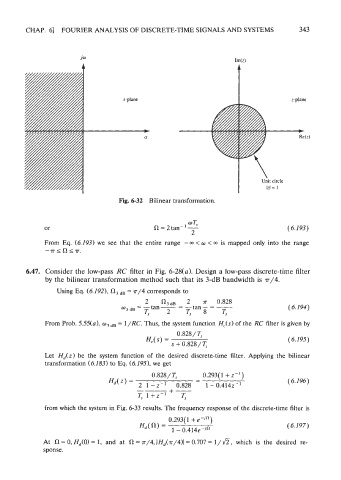
Fig. 6-32 Bilinear transformation.
From Eq. (6.193) we see that the entire range -a, < w <a, is mapped only into the range
-Trsn IT.
6.47. Consider the low-pass RC filter in Fig. 6-28(a). Design a low-pass discrete-time filter
by the bilinear transformation method such that its 3-dB bandwidth is ~/4.
Using Eq. (6.192), R, ,, = 7r/4 corresponds to
2 R,,, 2 7r 0.828
w,,, = -tan- = -tan- = -
Ts 2 Ts 8 Ts
From Prob. 5.55(a), w, ,, = l/RC. Thus, the system function H,(s) of the RC filter is given by
Let HJz) be the system function of the desired discrete-time filter. Applying the bilinear
transformation (6.183) to Eq. (6.1951, we get
from which the system in Fig. 6-33 results. The frequency response of the discrete-time filter is
At R = 0, Hd(0) = 1, and at R = ~/4, JHd(r/4)( = 0.707 = I/ fi, which is the desired re-
sponse.