
Page 300 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 300
INTRODUCTION 275
(a)
(b)
(c)
(d)
(e)
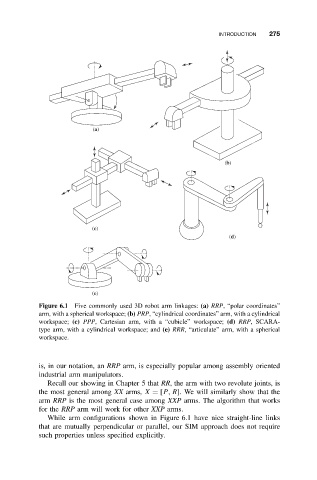
Figure 6.1 Five commonly used 3D robot arm linkages: (a) RRP, “polar coordinates”
arm, with a spherical workspace; (b) PRP, “cylindrical coordinates” arm, with a cylindrical
workspace; (c) PPP, Cartesian arm, with a “cubicle” workspace; (d) RRP, SCARA-
type arm, with a cylindrical workspace; and (e) RRR, “articulate” arm, with a spherical
workspace.
is, in our notation, an RRP arm, is especially popular among assembly oriented
industrial arm manipulators.
Recall our showing in Chapter 5 that RR, the arm with two revolute joints, is
the most general among XX arms, X = [P, R]. We will similarly show that the
arm RRP is the most general case among XXP arms. The algorithm that works
for the RRP arm will work for other XXP arms.
While arm configurations shown in Figure 6.1 have nice straight-line links
that are mutually perpendicular or parallel, our SIM approach does not require
such properties unless specified explicitly.