
Page 304 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 304
THE CASE OF THE PPP (CARTESIAN) ARM 279
l 3
l 3max d g
e f
P
J 1
o c
l 2
l 2max
J 3
l 1max J 2
a b
l 1
(a)
l 3
l 3max d g
e f
V 1
o V 1 l 2max c l 2
V 2 V 3
V 2 l 1max
l 1 V 3
(b)
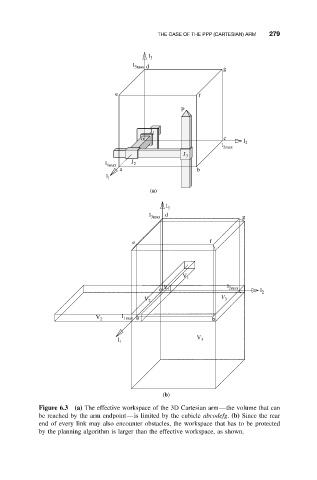
Figure 6.3 (a) The effective workspace of the 3D Cartesian arm—the volume that can
be reached by the arm endpoint—is limited by the cubicle abcodefg. (b) Since the rear
end of every link may also encounter obstacles, the workspace that has to be protected
by the planning algorithm is larger than the effective workspace, as shown.