
Page 306 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 306
THE CASE OF THE PPP (CARTESIAN) ARM 281
l 3
l 3max d g
e f
O 1
V 1
V l 2max
o 1
b
l 2
V 2
V
O 3 l 3
V 2 1max a a
l 1
V 3 O 2
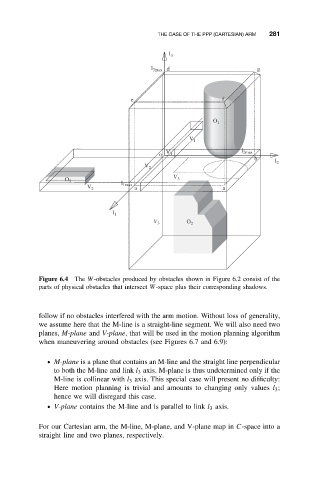
Figure 6.4 The W-obstacles produced by obstacles shown in Figure 6.2 consist of the
parts of physical obstacles that intersect W-space plus their corresponding shadows.
follow if no obstacles interfered with the arm motion. Without loss of generality,
we assume here that the M-line is a straight-line segment. We will also need two
planes, M-plane and V-plane, that will be used in the motion planning algorithm
when maneuvering around obstacles (see Figures 6.7 and 6.9):
• M-plane is a plane that contains an M-line and the straight line perpendicular
to both the M-line and link l 3 axis. M-plane is thus undetermined only if the
M-line is collinear with l 3 axis. This special case will present no difficulty:
Here motion planning is trivial and amounts to changing only values l 3 ;
hence we will disregard this case.
• V-plane contains the M-line and is parallel to link l 3 axis.
For our Cartesian arm, the M-line, M-plane, and V-plane map in C-space into a
straight line and two planes, respectively.