
Page 31 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 31
6 MOTION PLANNING—INTRODUCTION
that require motion planning. Robots in automotive industry are today among the
most successful, most cost-effective, and most reliable machines. Robot motion
planning algorithms have penetrated areas far from robotics, from designing
quick-to-disassemble aircraft engines (for part replacement at the airport gate)
to studies of folding mechanisms of DNA molecules.
It is the unstructured environment where our success stops. We have difficulty
moving robots into our messy world with its unending uncertainty. That is where
the situation is bleak indeed—and that is where robotics is needed badly.
The situation is not black and white but rather continuous. The closer a task
is to that in a fully structured environment, the better the chance that today’s
approaches with complete information will apply to it. This is good news. When
considering a robot mission to replace the batteries, gyroscopes, and some sci-
entific instruments of the aging Hubble Space Telescope, NASA engineers were
gratified to know that, with the telescope being a fully man-made creature, its
repair presents an almost fully structured task. The word “almost” is not to be
overlooked here—once in a while, things may not be exactly as planned: The
robot may encounter an unscrewed or bent bolt, a broken cover, or a shifted cable.
Unlike an automotive plant, where operators check out the setup once or twice
a day, no such luxury would exist for the Hubble ground operators. Although,
luckily, the amount of “unstructuredness” is small in the Hubble repair task, it
calls for serious attention to sensing hardware and to its intimate relation to robot
motion planning. Remarkably, even the “unstructuredness” that small led to the
project’s cancellation.
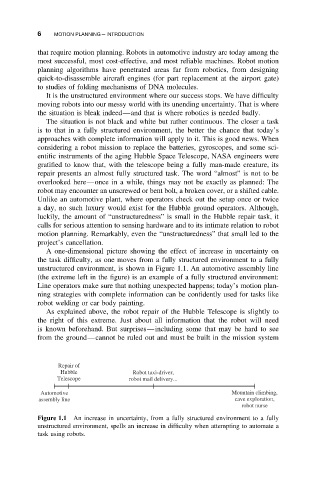
A one-dimensional picture showing the effect of increase in uncertainty on
the task difficulty, as one moves from a fully structured environment to a fully
unstructured environment, is shown in Figure 1.1. An automotive assembly line
(the extreme left in the figure) is an example of a fully structured environment:
Line operators make sure that nothing unexpected happens; today’s motion plan-
ning strategies with complete information can be confidently used for tasks like
robot welding or car body painting.
As explained above, the robot repair of the Hubble Telescope is slightly to
the right of this extreme. Just about all information that the robot will need
is known beforehand. But surprises—including some that may be hard to see
from the ground—cannot be ruled out and must be built in the mission system
Repair of
Hubble Robot taxi-driver,
Telescope robot mail delivery...
Automotive Mountain climbing,
assembly line cave exploration,
robot nurse
Figure 1.1 An increase in uncertainty, from a fully structured environment to a fully
unstructured environment, spells an increase in difficulty when attempting to automate a
task using robots.