
Page 192 - Sensors and Control Systems in Manufacturing
P. 192
Fiber Optics in Sensors and Contr ol Systems
is relatively clean, and where scanning ranges are typically a few 153
meters in length. Retro is also used for code-reading applications.
Automatic storage and retrieval systems and automatic conveyer
routing systems use retroreflective code plates to identify locations
and/or products.
3.8.3 Proximity (Diffuse) Sensing Mode
In the proximity (diffuse) sensing mode, light from the emitter strikes
a surface of an object at some arbitrary angle and is diffused from the
surface at all angles. The object is detected when the receiver captures
some small percentage of the diffused light. Also called the direct
reflection mode or simply the photoelectric proximity mode, this
method provides direct sensing of an object by its presence in front of
a sensor. A variation is the ultrasonic proximity sensor, in which an
object is sensed when its surface reflects a sound wave back to an
acoustic sensor.
3.8.4 Divergent Sensing Mode
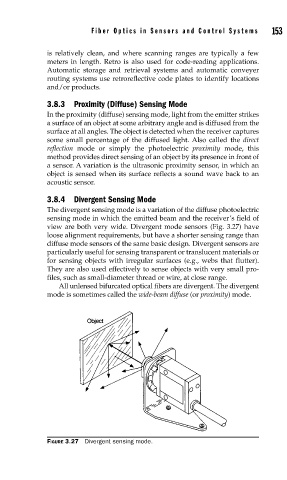
The divergent sensing mode is a variation of the diffuse photoelectric
sensing mode in which the emitted beam and the receiver’s field of
view are both very wide. Divergent mode sensors (Fig. 3.27) have
loose alignment requirements, but have a shorter sensing range than
diffuse mode sensors of the same basic design. Divergent sensors are
particularly useful for sensing transparent or translucent materials or
for sensing objects with irregular surfaces (e.g., webs that flutter).
They are also used effectively to sense objects with very small pro-
files, such as small-diameter thread or wire, at close range.
All unlensed bifurcated optical fibers are divergent. The divergent
mode is sometimes called the wide-beam diffuse (or proximity) mode.
FIGURE 3.27 Divergent sensing mode.