
Page 245 - The Definitive Guide to Building Java Robots
P. 245
Preston_5564C07.fm Page 226 Monday, September 26, 2005 5:38 AM
226 CHAPTER 7 ■ NAVIGATION
For sensing, I use a Devantech CMPS03 digital compass, two GP2D02 Sharp Infrared
sensors, three SRF04 sonar devices, and two Pyro 1394 webcams. To move the webcams, I used
the Pan & Tilt Kit from Lynxmotion. To connect the sensors, I used a Preston Research Sonar
Distribution Module and a CMPS03 carrier board.
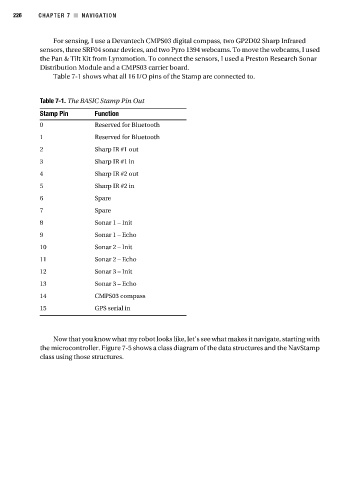
Table 7-1 shows what all 16 I/O pins of the Stamp are connected to.
Table 7-1. The BASIC Stamp Pin Out
Stamp Pin Function
0 Reserved for Bluetooth
1 Reserved for Bluetooth
2 Sharp IR #1 out
3 Sharp IR #1 in
4 Sharp IR #2 out
5 Sharp IR #2 in
6 Spare
7 Spare
8 Sonar 1 – Init
9 Sonar 1 – Echo
10 Sonar 2 – Init
11 Sonar 2 – Echo
12 Sonar 3 – Init
13 Sonar 3 – Echo
14 CMPS03 compass
15 GPS serial in
Now that you know what my robot looks like, let’s see what makes it navigate, starting with
the microcontroller. Figure 7-5 shows a class diagram of the data structures and the NavStamp
class using those structures.