
Page 39 - The Mechatronics Handbook
P. 39
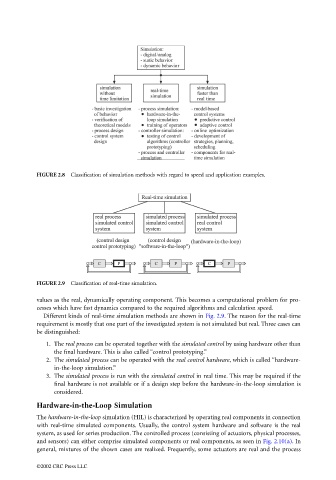
FIGURE 2.8 Classification of simulation methods with regard to speed and application examples.
FIGURE 2.9 Classification of real-time simulation.
values as the real, dynamically operating component. This becomes a computational problem for pro-
cesses which have fast dynamics compared to the required algorithms and calculation speed.
Different kinds of real-time simulation methods are shown in Fig. 2.9. The reason for the real-time
requirement is mostly that one part of the investigated system is not simulated but real. Three cases can
be distinguished:
1. The real process can be operated together with the simulated control by using hardware other than
the final hardware. This is also called “control prototyping.”
2. The simulated process can be operated with the real control hardware, which is called “hardware-
in-the-loop simulation.”
3. The simulated process is run with the simulated control in real time. This may be required if the
final hardware is not available or if a design step before the hardware-in-the-loop simulation is
considered.
Hardware-in-the-Loop Simulation
The hardware-in-the-loop simulation (HIL) is characterized by operating real components in connection
with real-time simulated components. Usually, the control system hardware and software is the real
system, as used for series production. The controlled process (consisting of actuators, physical processes,
and sensors) can either comprise simulated components or real components, as seen in Fig. 2.10(a). In
general, mixtures of the shown cases are realized. Frequently, some actuators are real and the process
©2002 CRC Press LLC