
Page 299 - Thomson, William Tyrrell-Theory of Vibration with Applications-Taylor _ Francis (2010)
P. 299
286 Vibration of Continuous Systems Chap. 9
From Table 9.5-1, the first natural frequency becomes
[ 15.03 X 10^
a>, =3.52, / --------------- = 28.12 rad/s
^ ( 2 0 X 1 2 /
= 4.48 c.p.s.
9.6 EFFECT OF ROTARY INERTIA
AND SHEAR DEFORMATION
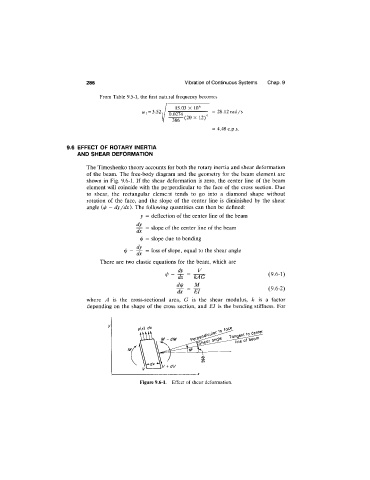
The Timoshenko theory accounts for both the rotary inertia and shear deformation
of the beam. The free-body diagram and the geometry for the beam element are
shown in Fig. 9.6-1. If the shear deformation is zero, the center line of the beam
element will coincide with the perpendicular to the face of the cross section. Due
to shear, the rectangular element tends to go into a diamond shape without
rotation of the face, and the slope of the center line is diminished by the shear
angle (if/ - dy/dx). The following quantities can then be defined:
y = deflection of the center line of the beam
dy
= slope of the center line of the beam
il/ = slope due to bending
dy
- ^ = loss of slope, equal to the shear angle
There are two elastic equations for the beam, which are
(9.6-1)
dx kAG
difj _ M (9.6-2)
dx El
:
where A is the cross-sectional area, G is the shear modulus, A is a factor
depending on the shape of the cross section, and El is the bending stiffness. For
Figure 9.6-1. E ffect o f shear deform ation.