
Page 35 - Bird R.B. Transport phenomena
P. 35
20 Chapter 1 Viscosity and the Mechanisms of Momentum Transport
Solid sphere
Solid cylinder of radius R \
of radius R
Force by fluid in
+0 direction on Force by fluid in
surface element в direction on
(RdO)(dz) is surface element
у (RdO)(R sin в d</>) is
2
-T re \ r = R R sind ddd<}>
Solid cylinder Solid sphere
of radius R of radius R
Force by fluid in Force by fluid in
\ +z direction on ф direction on
surface element surface element
(RddXdz) is у (Rd$)(R sin в d4>) is
2
R Rd0dz -T r<t> \ r = R R sin вddd<t>
-T rz \ r =
Ск surface element Solid cone (dr)(r sin a d<f>) is
Solid notched Force by fluid in
cylinder Force by fluid in r direction on
z direction on
surface element
with half
(dr)(dz) is
a rsinadrd<t>
angle a
=
z / ' X
(a)
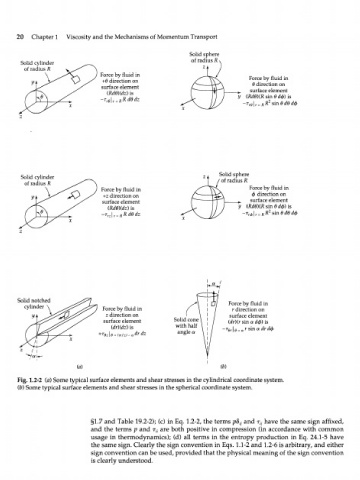
Fig. 1.2-2 (a) Some typical surface elements and shear stresses in the cylindrical coordinate system.
(b) Some typical surface elements and shear stresses in the spherical coordinate system.
§1.7 and Table 19.2-2); (c) in Eq. 1.2-2, the terms pd {j and r have the same sign affixed,
tj
and the terms p and r are both positive in compression (in accordance with common
;7
usage in thermodynamics); (d) all terms in the entropy production in Eq. 24.1-5 have
the same sign. Clearly the sign convention in Eqs. 1.1-2 and 1.2-6 is arbitrary, and either
sign convention can be used, provided that the physical meaning of the sign convention
is clearly understood.