
Page 301 - Understanding Automotive Electronics
P. 301
2735 | CH 8 Page 288 Tuesday, March 10, 1998 1:19 PM
8 VEHICLE MOTION CONTROL
Lateral acceleration A is proportional to vehicle speed and input steering
L
angle:
A = kVq s
L
where
V is the speed of the car
q is the steering angle
s
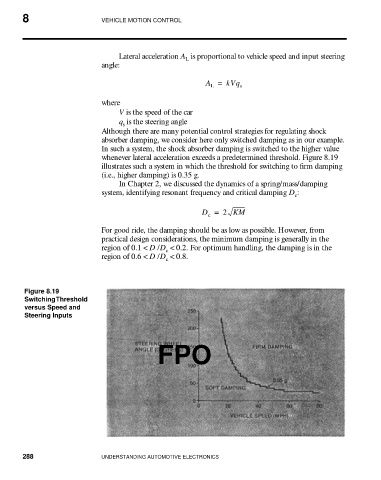
Although there are many potential control strategies for regulating shock
absorber damping, we consider here only switched damping as in our example.
In such a system, the shock absorber damping is switched to the higher value
whenever lateral acceleration exceeds a predetermined threshold. Figure 8.19
illustrates such a system in which the threshold for switching to firm damping
(i.e., higher damping) is 0.35 g.
In Chapter 2, we discussed the dynamics of a spring/mass/damping
system, identifying resonant frequency and critical damping D :
c
D = 2 KM
c
For good ride, the damping should be as low as possible. However, from
practical design considerations, the minimum damping is generally in the
region of 0.1 < D /D < 0.2. For optimum handling, the damping is in the
c
region of 0.6 < D /D < 0.8.
c
Figure 8.19
Switching Threshold
versus Speed and
Steering Inputs
FPO
288 UNDERSTANDING AUTOMOTIVE ELECTRONICS