
Page 78 - Understanding Automotive Electronics
P. 78
2735 | CH 2 Page 65 Tuesday, March 10, 1998 10:55 AM
THE SYSTEMS APPROACH TO CONTROL AND INSTRUMENTATION 2
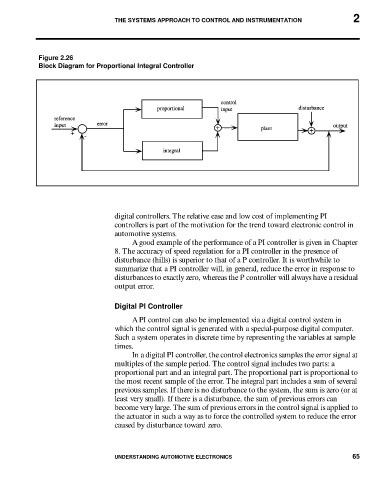
Figure 2.26
Block Diagram for Proportional Integral Controller
digital controllers. The relative ease and low cost of implementing PI
controllers is part of the motivation for the trend toward electronic control in
automotive systems.
A good example of the performance of a PI controller is given in Chapter
8. The accuracy of speed regulation for a PI controller in the presence of
disturbance (hills) is superior to that of a P controller. It is worthwhile to
summarize that a PI controller will, in general, reduce the error in response to
disturbances to exactly zero, whereas the P controller will always have a residual
output error.
Digital PI Controller
A PI control can also be implemented via a digital control system in
which the control signal is generated with a special-purpose digital computer.
Such a system operates in discrete time by representing the variables at sample
times.
In a digital PI controller, the control electronics samples the error signal at
multiples of the sample period. The control signal includes two parts: a
proportional part and an integral part. The proportional part is proportional to
the most recent sample of the error. The integral part includes a sum of several
previous samples. If there is no disturbance to the system, the sum is zero (or at
least very small). If there is a disturbance, the sum of previous errors can
become very large. The sum of previous errors in the control signal is applied to
the actuator in such a way as to force the controlled system to reduce the error
caused by disturbance toward zero.
UNDERSTANDING AUTOMOTIVE ELECTRONICS 65