
Page 140 - Video Coding for Mobile Communications Efficiency, Complexity, and Resilience
P. 140
Section 4.7. A Comparative Study 117
Foreman @ 25 f.p.s. Foreman @ 25 f.p.s.
8000 10000
6000 8000
SAD 4000 SAD 6000
2000 4000
0 2000
15 15
10 15 10 15
5 10 5 10
0 5 0 5
−5 −5 0 −5 −5 0
−10 −10 −10 −10
d y −15 −15 d x d y −15 −15 d x
(a) (b)
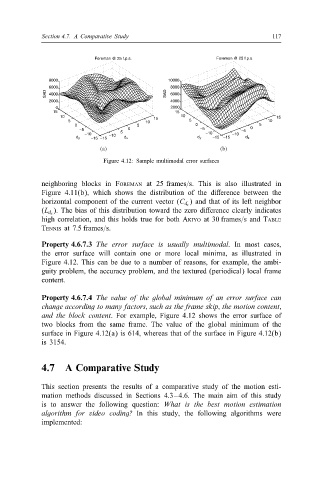
Figure 4.12: Sample multimodal error surfaces
neighboring blocks in FOREMAN at 25 frames=s. This is also illustrated in
Figure 4.11(b), which shows the distribution of the di erence between the
) and that of its left neighbor
horizontal component of the current vector (C d x
). The bias of this distribution toward the zero di erence clearly indicates
(L d x
high correlation, and this holds true for both AKIYO at 30 frames=s and TABLE
TENNIS at 7:5 frames=s.
Property 4.6.7.3 The error surface is usually multimodal. In most cases,
the error surface will contain one or more local minima, as illustrated in
Figure 4.12. This can be due to a number of reasons, for example, the ambi-
guity problem, the accuracy problem, and the textured (periodical) local frame
content.
Property 4.6.7.4 The value of the global minimum of an error surface can
change according to many factors; such as the frame skip; the motion content;
and the block content. For example, Figure 4.12 shows the error surface of
two blocks from the same frame. The value of the global minimum of the
surface in Figure 4.12(a) is 614, whereas that of the surface in Figure 4.12(b)
is 3154.
4.7 A Comparative Study
This section presents the results of a comparative study of the motion esti-
mation methods discussed in Sections 4.3–4.6. The main aim of this study
is to answer the following question: What is the best motion estimation
algorithm for video coding? In this study, the following algorithms were
implemented: