
Page 153 - Welding Robots Technology, System Issues, and Applications
P. 153
Consequently, the “automatic mode” cycle should look like the following:
140 Welding Robots
CASE 9000:
WHILE decision1 = 9000 DO
WaitUntil di_piece_in_place = 1;
SetDO piece_weld_done, 0;
! Approach P1
MOVEJ Offset(P1, 0, 0, 200), v200, z50, tool_torch;
MOVEJ Offset P1, v100, z50, tool_torch;
! Weld from P1 to P2
weld_on
MOVEL P2, velocity, fine, tool_torch;
weld_off;
! Move to SAFE position
MOVEJ Offset(P2, 0, 0, 200), v100, z50, tool_torch;
MOVEJ Offset(Pcorner, 0, 0, 200), v200, z50, tool_torch;
! Signal handshake: end of cycle
SetDO piece_weld_done, 1;
WaitUntil di_piece_in_place = 0;
ENDWHILE:
decision1:=0;
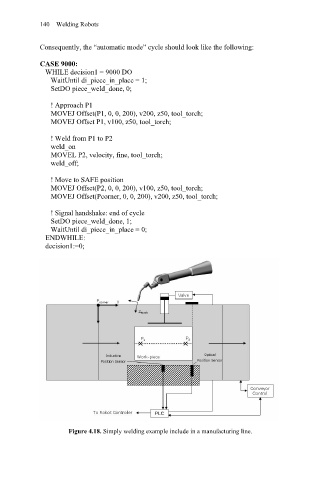
Figure 4.18. Simply welding example include in a manufacturing line.