
Page 30 - Welding Robots Technology, System Issues, and Applications
P. 30
Welding Robots
14
means to build those mechanisms with enough precision and there was no
permanent power source available (pneumatic, hydraulic or electric). Maybe that
was why he didn’t finish his robot project [1],[2], a fifteenth century knight robot
(Figure 1.5) intended to be placed in the “Salle delle Asse” of the Sforza family
castle (Milan, Italy). It wasn’t good enough. Or it was a so revolutionary idea for
the time that he thought that maybe it was better to make it disappear [1],[2].
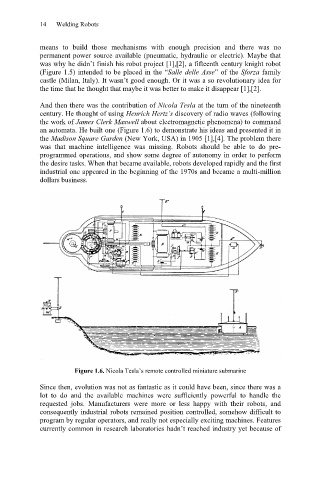
And then there was the contribution of Nicola Tesla at the turn of the nineteenth
century. He thought of using Henrich Hertz’s discovery of radio waves (following
the work of James Clerk Maxwell about electromagnetic phenomena) to command
an automata. He built one (Figure 1.6) to demonstrate his ideas and presented it in
the Madison Square Garden (New York, USA) in 1905 [1],[4]. The problem there
was that machine intelligence was missing. Robots should be able to do pre-
programmed operations, and show some degree of autonomy in order to perform
the desire tasks. When that became available, robots developed rapidly and the first
industrial one appeared in the beginning of the 1970s and became a multi-million
dollars business.
Figure 1.6. Nicola Tesla’s remote controlled miniature submarine
Since then, evolution was not as fantastic as it could have been, since there was a
lot to do and the available machines were sufficiently powerful to handle the
requested jobs. Manufacturers were more or less happy with their robots, and
consequently industrial robots remained position controlled, somehow difficult to
program by regular operators, and really not especially exciting machines. Features
currently common in research laboratories hadn’t reached industry yet because of