
Page 191 - Mechanical Behavior of Materials
P. 191
192 Chapter 5 Stress–Strain Relationships and Behavior
P 1 2
Force P´
Input t
0 3 4
Description Model x-t Response P-x Path
x 1 2 1,2
P
P´/k k
(a) Elastic P
P = kx k 0 3 4 t x
(σ = Eε) x 0,3,4
x x = 0
P´< P t P´> P
x o o
(b) Plastic 2,3 4 1 2
x = 0 if |P| < P o μ m P x 2 P
(ε = 0 if |σ| < σ ) x = at x
o 2 p
P´> P o
0,1 t 0 3,4 x
2,3 4 1 2
(c) Steady-state creep P x P
•
P = cx c x P´/c x sc
•
(σ = ηε) t
0,1 0 3,4 x
c P´/c
(d) Transient creep 2,3 1 2
P = kx + cx • m=0 P x P
•
(σ = Eε + ηε) P´/k x tc
k x t x
0,1 4 0 4 3
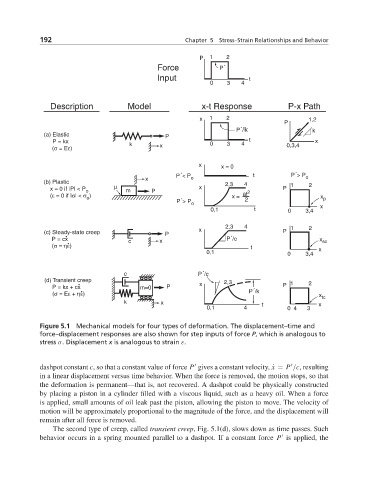
Figure 5.1 Mechanical models for four types of deformation. The displacement–time and
force–displacement responses are also shown for step inputs of force P, which is analogous to
stress σ. Displacement x is analogous to strain ε.
dashpot constant c, so that a constant value of force P gives a constant velocity, ˙x = P /c, resulting
in a linear displacement versus time behavior. When the force is removed, the motion stops, so that
the deformation is permanent—that is, not recovered. A dashpot could be physically constructed
by placing a piston in a cylinder filled with a viscous liquid, such as a heavy oil. When a force
is applied, small amounts of oil leak past the piston, allowing the piston to move. The velocity of
motion will be approximately proportional to the magnitude of the force, and the displacement will
remain after all force is removed.
The second type of creep, called transient creep, Fig. 5.1(d), slows down as time passes. Such
behavior occurs in a spring mounted parallel to a dashpot. If a constant force P is applied, the