
Page 116 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 116
Dead-Zone Dynamics and Modeling 111
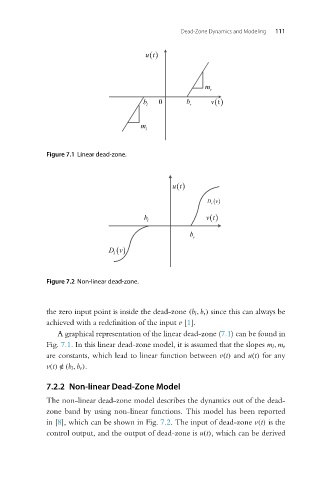
Figure 7.1 Linear dead-zone.
Figure 7.2 Non-linear dead-zone.
the zero input point is inside the dead-zone (b l ,b r ) since this can always be
achieved with a redefinition of the input v [1].
A graphical representation of the linear dead-zone (7.1) can be found in
Fig. 7.1. In this linear dead-zone model, it is assumed that the slopes m l ,m r
are constants, which lead to linear function between v(t) and u(t) for any
v(t)/∈ (b l ,b r ).
7.2.2 Non-linear Dead-Zone Model
The non-linear dead-zone model describes the dynamics out of the dead-
zone band by using non-linear functions. This model has been reported
in [8],whichcanbe showninFig. 7.2. The input of dead-zone v(t) is the
control output, and the output of dead-zone is u(t), which can be derived