
Page 234 - Amphibionics : Build Your Own Biologically Inspired Robot
P. 234
Amphibionics 06 3/24/03 9:02 AM Page 213
Chapter 6 / Crocobot: Build Your Own Robotic Crocodile
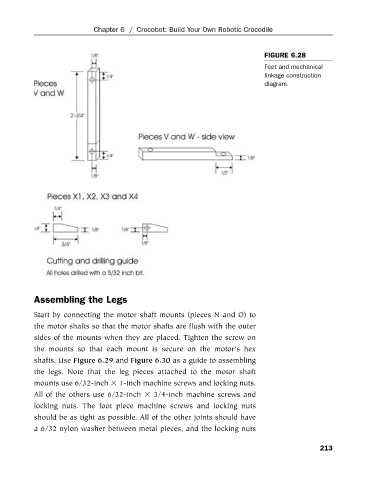
FIGURE 6.28
Feet and mechanical
linkage construction
diagram.
Assembling the Legs
Start by connecting the motor shaft mounts (pieces N and O) to
the motor shafts so that the motor shafts are flush with the outer
sides of the mounts when they are placed. Tighten the screw on
the mounts so that each mount is secure on the motor’s hex
shafts. Use Figure 6.29 and Figure 6.30 as a guide to assembling
the legs. Note that the leg pieces attached to the motor shaft
mounts use 6/32-inch 1-inch machine screws and locking nuts.
All of the others use 6/32-inch 3/4-inch machine screws and
locking nuts. The foot piece machine screws and locking nuts
should be as tight as possible. All of the other joints should have
a 6/32 nylon washer between metal pieces, and the locking nuts
213