
Page 220 - Artificial Intelligence for Computational Modeling of the Heart
P. 220
Chapter 6 Additional clinical applications 193
results of CFD computations. Fig. 6.5 displays the workflow for
mesh pre-processing.
The synthetic vessel model consists of two separately param-
eterized functions: one for describing the vessel centerline, and
one for describing the surface. The vessel centerline is a three-
dimensional Bezier curve defined by five control points, while the
surface model is a function ¯ =¯r(z,φ),where r is the vessel radius,
r
z is the position on the centerline, and φ is the angle. The surface
points are expressed in cylindrical coordinates with respect to the
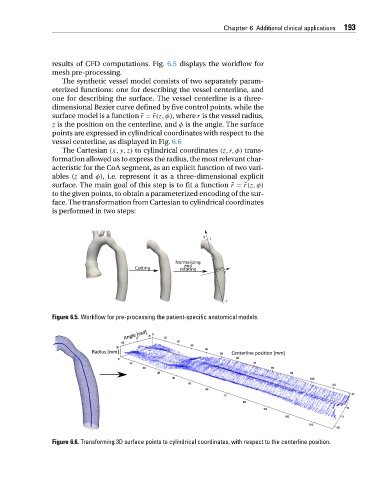
vessel centerline, as displayed in Fig. 6.6
The Cartesian (x,y,z) to cylindrical coordinates (z,r,φ) trans-
formation allowed us to express the radius, the most relevant char-
acteristic for the CoA segment, as an explicit function of two vari-
ables (z and φ), i.e. represent it as a three-dimensional explicit
surface. The main goal of this step is to fit a function ¯ =¯r(z,φ)
r
to the given points, to obtain a parameterized encoding of the sur-
face. The transformation from Cartesian to cylindrical coordinates
is performed in two steps:
Figure 6.5. Workflow for pre-processing the patient-specific anatomical models.
Figure 6.6. Transforming 3D surface points to cylindrical coordinates, with respect to the centerline position.