
Page 410 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 410
Vehicle motion control C HAPTER 13.1
Fig. 13.1-23 4WS Configuration.
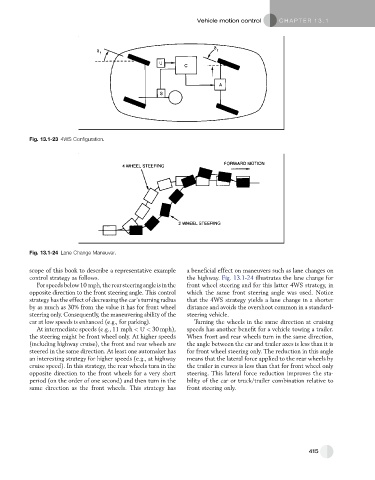
Fig. 13.1-24 Lane Change Maneuver.
scope of this book to describe a representative example a beneficial effect on maneuvers such as lane changes on
control strategy as follows. the highway. Fig. 13.1-24 illustrates the lane change for
Forspeedsbelow10 mph,therearsteeringangleisinthe front wheel steering and for this latter 4WS strategy, in
opposite direction to the front steering angle. This control which the same front steering angle was used. Notice
strategy has the effect of decreasing the car’s turning radius that the 4WS strategy yields a lane change in a shorter
by as much as 30% from the value it has for front wheel distance and avoids the overshoot common in a standard-
steering only. Consequently, the maneuvering ability of the steering vehicle.
car at low speeds is enhanced (e.g., for parking). Turning the wheels in the same direction at cruising
At intermediate speeds (e.g., 11 mph < U < 30 mph), speeds has another benefit for a vehicle towing a trailer.
the steering might be front wheel only. At higher speeds When front and rear wheels turn in the same direction,
(including highway cruise), the front and rear wheels are the angle between the car and trailer axes is less than it is
steered in the same direction. At least one automaker has for front wheel steering only. The reduction in this angle
an interesting strategy for higher speeds (e.g., at highway means that the lateral force applied to the rear wheels by
cruise speed). In this strategy, the rear wheels turn in the the trailer in curves is less than that for front wheel only
opposite direction to the front wheels for a very short steering. This lateral force reduction improves the sta-
period (on the order of one second) and then turn in the bility of the car or truck/trailer combination relative to
same direction as the front wheels. This strategy has front steering only.
415