
Page 372 - Autonomous Mobile Robots
P. 372
362 Autonomous Mobile Robots
(a) t=33.700sec
3
2.5
2
1.5
1 y
x
P2 S4
0.5 y x
B1 y
0 x y R1
x
– 0.5
y
– 1
P1 S3
x
– 1.5 y
x
– 2
– 2 – 1.5 – 1 – 0.5 0 0.5 1 1.5 2 2.5 3 3.5
(b) t=48.492sec
3
2.5
2
1.5
1
S2
x
0.5 y y R2
B2 y x
0 x
– 0.5 y
S1 x
– 1
– 1.5
– 2
– 2 – 1.5 – 1 – 0.5 0 0.5 1 1.5 2 2.5 3 3.5
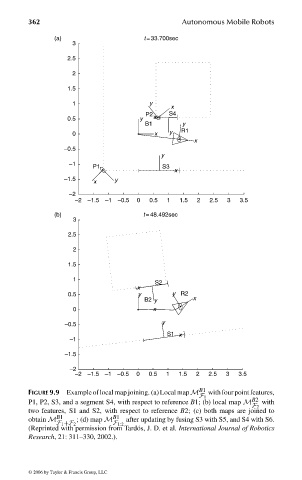
FIGURE 9.9 Exampleoflocalmapjoining. (a)LocalmapM B1 withfourpointfeatures,
F 1
B2
P1, P2, S3, and a segment S4, with respect to reference B1; (b) local map M with
F 2
two features, S1 and S2, with respect to reference B2; (c) both maps are joined to
B1 B1
obtain M ; (d) map M after updating by fusing S3 with S5, and S4 with S6.
F 1 +F 2 F 1:2
(Reprinted with permission from Tardós, J. D. et al. International Journal of Robotics
Research, 21: 311–330, 2002.).
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c009” — 2006/3/31 — 16:43 — page 362 — #32