
Page 151 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 151
128 BIOMECHANICS OF THE HUMAN BODY
reaction forces
Ligament forces
Muscle forces Joint contact forces Joint moments and .. .
Musculo-
F
skeletal
..
F 1 2 geometry T 1 2 Equations θ 1 d θ . 1 d θ 1 Position
θ
θ
θ
T
of
F 3 (moment motion 2 dt 2 dt 2 data
arms)
Force
plate data
(CP, F , F , F ,
y
x
z
M , M , M )
z
y
x
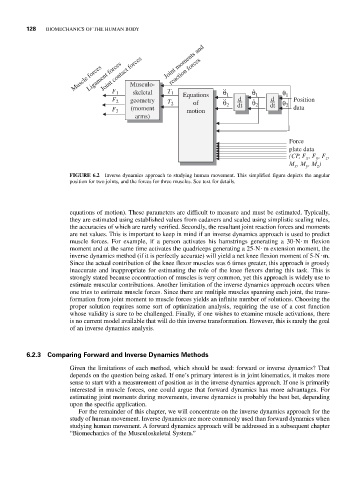
FIGURE 6.2 Inverse dynamics approach to studying human movement. This simplified figure depicts the angular
position for two joints, and the forces for three muscles. See text for details.
equations of motion). These parameters are difficult to measure and must be estimated. Typically,
they are estimated using established values from cadavers and scaled using simplistic scaling rules,
the accuracies of which are rarely verified. Secondly, the resultant joint reaction forces and moments
are net values. This is important to keep in mind if an inverse dynamics approach is used to predict
.
muscle forces. For example, if a person activates his hamstrings generating a 30-N m flexion
.
moment and at the same time activates the quadriceps generating a 25-N m extension moment, the
.
inverse dynamics method (if it is perfectly accurate) will yield a net knee flexion moment of 5-N m.
Since the actual contribution of the knee flexor muscles was 6 times greater, this approach is grossly
inaccurate and inappropriate for estimating the role of the knee flexors during this task. This is
strongly stated because cocontraction of muscles is very common, yet this approach is widely use to
estimate muscular contributions. Another limitation of the inverse dynamics approach occurs when
one tries to estimate muscle forces. Since there are multiple muscles spanning each joint, the trans-
formation from joint moment to muscle forces yields an infinite number of solutions. Choosing the
proper solution requires some sort of optimization analysis, requiring the use of a cost function
whose validity is sure to be challenged. Finally, if one wishes to examine muscle activations, there
is no current model available that will do this inverse transformation. However, this is rarely the goal
of an inverse dynamics analysis.
6.2.3 Comparing Forward and Inverse Dynamics Methods
Given the limitations of each method, which should be used: forward or inverse dynamics? That
depends on the question being asked. If one’s primary interest is in joint kinematics, it makes more
sense to start with a measurement of position as in the inverse dynamics approach. If one is primarily
interested in muscle forces, one could argue that forward dynamics has more advantages. For
estimating joint moments during movements, inverse dynamics is probably the best bet, depending
upon the specific application.
For the remainder of this chapter, we will concentrate on the inverse dynamics approach for the
study of human movement. Inverse dynamics are more commonly used than forward dynamics when
studying human movement. A forward dynamics approach will be addressed in a subsequent chapter
“Biomechanics of the Musculoskeletal System.”