
Page 152 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 152
BIOMECHANICS OF HUMAN MOVEMENT 129
6.3 TOOLS FOR MEASURING HUMAN MOVEMENT
In this section we will discuss three of the more common methods used to collect human movement
data: electrogoniometers, electromagnetic tracking devices and opto-electronic measuring systems.
Of these distinctly different measuring tools, optoelectronic systems are the most common registration
method, and therefore the majority of this section will focus on video-based motion analysis.
6.3.1 Electrogoniometers
Electrogoniometers are devices that convert joint angle to a voltage. The voltage can be sampled
continuously, making electrogoniometers ideal for measuring dynamic movement. There are basi-
cally two designs, both of which fall under the category of resistive transducers. These devices,
namely, potentiometers and strain gauges, output a voltage related to the angular position of the joint.
The voltage is converted to an angle using a manufacturer-supplied scale factor specific to each
transducer. The joint angle can be displayed in real-time and/or stored on a computer equipped with
an analog to digital data acquisition card.
Potentiometers. A potentiometer is nothing more than a variable resistor that is sensitive to changes in
angular position. Two arms, one fixed to the outer casing of the potentiometer and the other to the rotat-
ing shaft can be used to mount the device to the segments on either side of a joint. The potentiometer is
placed over the joint axis of rotation with the arms secured to the segments using medical tape or elas-
ticized wraps. Changes in joint angle will cause the wiper (i.e., sliding contact) of the potentiometer to
slide across the resistor resulting in an output voltage linearly related to the joint angle. It is important
that the potentiometer be placed over the axis of rotation; otherwise, movement of the joint will be
restricted. The electrogoniometer is ideally positioned when the rotating shaft of the potentiometer and
the joint axis of rotation are aligned. More elaborate mounting methods have been designed to house
mutually perpendicular potentiometers in multi-degree-of-freedom exoskeletal linkages (e.g., Chao,
1980; Shiavi et al., 1987). These devices are no longer commonly used, but are mentioned for historical
purposes since they have played an important role in many previous studies.
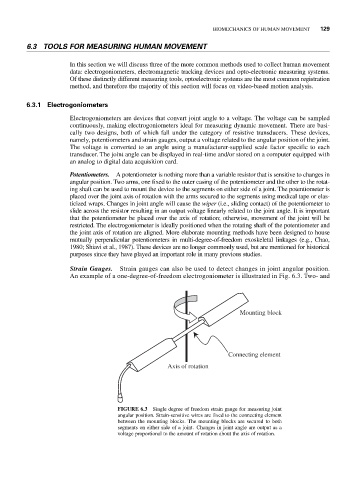
Strain Gauges. Strain gauges can also be used to detect changes in joint angular position.
An example of a one-degree-of-freedom electrogoniometer is illustrated in Fig. 6.3. Two- and
Mounting block
Connecting element
Axis of rotation
FIGURE 6.3 Single degree of freedom strain gauge for measuring joint
angular position. Strain-sensitive wires are fixed to the connecting element
between the mounting blocks. The mounting blocks are secured to both
segments on either side of a joint. Changes in joint angle are output as a
voltage proportional to the amount of rotation about the axis of rotation.