
Page 403 - Biomedical Engineering and Design Handbook Volume 2, Applications
P. 403
SURGICAL SIMULATION TECHNOLOGIES 381
Virtual
+ +
Segmentation and environment
mesh generation
Medical imaging Geometric mesh Dynamic model Complete model of
data (MRI) (patient specific) anatomical entity
Physical behavior Surface color,
and tissue parameters texture, and other
visual properties
A
Virtual
Collision
surgical
detection
instrument
Haptic Deformable
Human Visual
interface object
operator display
device model
Haptic Collision
rendering response
algorithm
B
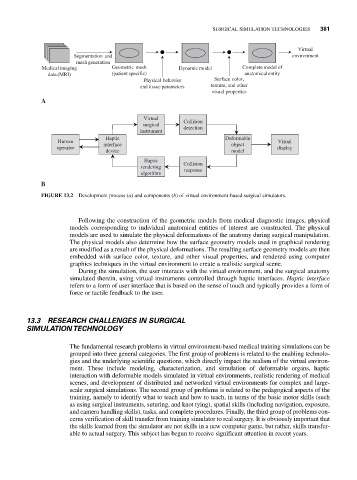
FIGURE 13.2 Development process (a) and components (b) of virtual environment-based surgical simulators.
Following the construction of the geometric models from medical diagnostic images, physical
models corresponding to individual anatomical entities of interest are constructed. The physical
models are used to simulate the physical deformations of the anatomy during surgical manipulation.
The physical models also determine how the surface geometry models used in graphical rendering
are modified as a result of the physical deformations. The resulting surface geometry models are then
embedded with surface color, texture, and other visual properties, and rendered using computer
graphics techniques in the virtual environment to create a realistic surgical scene.
During the simulation, the user interacts with the virtual environment, and the surgical anatomy
simulated therein, using virtual instruments controlled through haptic interfaces. Haptic interface
refers to a form of user interface that is based on the sense of touch and typically provides a form of
force or tactile feedback to the user.
13.3 RESEARCH CHALLENGES IN SURGICAL
SIMULATION TECHNOLOGY
The fundamental research problems in virtual environment-based medical training simulations can be
grouped into three general categories. The first group of problems is related to the enabling technolo-
gies and the underlying scientific questions, which directly impact the realism of the virtual environ-
ment. These include modeling, characterization, and simulation of deformable organs, haptic
interaction with deformable models simulated in virtual environments, realistic rendering of medical
scenes, and development of distributed and networked virtual environments for complex and large-
scale surgical simulations. The second group of problems is related to the pedagogical aspects of the
training, namely to identify what to teach and how to teach, in terms of the basic motor skills (such
as using surgical instruments, suturing, and knot tying), spatial skills (including navigation, exposure,
and camera handling skills), tasks, and complete procedures. Finally, the third group of problems con-
cerns verification of skill transfer from training simulator to real surgery. It is obviously important that
the skills learned from the simulator are not skills in a new computer game, but rather, skills transfer-
able to actual surgery. This subject has begun to receive significant attention in recent years.