
Page 407 - Biomedical Engineering and Design Handbook Volume 2, Applications
P. 407
SURGICAL SIMULATION TECHNOLOGIES 385
Force model
Force
Local mesh
Global geometry Local Haptic device
simulation Local mesh simulation
geometry
Instrument Instrument
position position
10 Hz 1000 Hz
A
Instrument Instrument
x x
Stationary
y y
Stationary Stationary
B
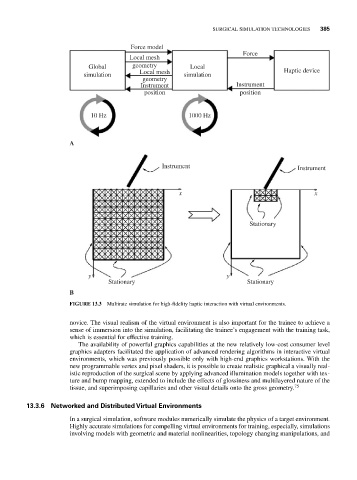
FIGURE 13.3 Multirate simulation for high-fidelity haptic interaction with virtual environments.
novice. The visual realism of the virtual environment is also important for the trainee to achieve a
sense of immersion into the simulation, facilitating the trainee’s engagement with the training task,
which is essential for effective training.
The availability of powerful graphics capabilities at the new relatively low-cost consumer level
graphics adapters facilitated the application of advanced rendering algorithms in interactive virtual
environments, which was previously possible only with high-end graphics workstations. With the
new programmable vertex and pixel shaders, it is possible to create realistic graphical a visually real-
istic reproduction of the surgical scene by applying advanced illumination models together with tex-
ture and bump mapping, extended to include the effects of glossiness and multilayered nature of the
tissue, and superimposing capillaries and other visual details onto the gross geometry. 75
13.3.6 Networked and Distributed Virtual Environments
In a surgical simulation, software modules numerically simulate the physics of a target environment.
Highly accurate simulations for compelling virtual environments for training, especially, simulations
involving models with geometric and material nonlinearities, topology changing manipulations, and