
Page 149 - Build Your Own Combat Robot
P. 149
Build Your Own Combat Robot
130
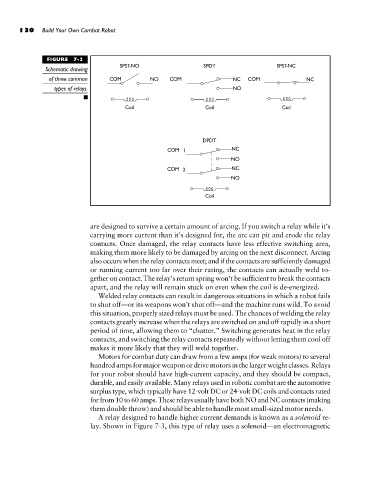
FIGURE 7-2
Schematic drawing
of three common
types of relays.
are designed to survive a certain amount of arcing. If you switch a relay while it’s
carrying more current than it’s designed for, the arc can pit and erode the relay
contacts. Once damaged, the relay contacts have less effective switching area,
making them more likely to be damaged by arcing on the next disconnect. Arcing
also occurs when the relay contacts meet; and if the contacts are sufficiently damaged
or running current too far over their rating, the contacts can actually weld to-
gether on contact. The relay’s return spring won’t be sufficient to break the contacts
apart, and the relay will remain stuck on even when the coil is de-energized.
Welded relay contacts can result in dangerous situations in which a robot fails
to shut off—or its weapons won’t shut off—and the machine runs wild. To avoid
this situation, properly sized relays must be used. The chances of welding the relay
contacts greatly increase when the relays are switched on and off rapidly in a short
period of time, allowing them to “chatter.” Switching generates heat in the relay
contacts, and switching the relay contacts repeatedly without letting them cool off
makes it more likely that they will weld together.
Motors for combat duty can draw from a few amps (for weak motors) to several
hundred amps for major weapon or drive motors in the larger weight classes. Relays
for your robot should have high-current capacity, and they should be compact,
durable, and easily available. Many relays used in robotic combat are the automotive
surplus type, which typically have 12-volt DC or 24-volt DC coils and contacts rated
for from10 to 60 amps. These relays usually have both NO and NC contacts (making
them double throw) and should be able to handle most small-sized motor needs.
A relay designed to handle higher current demands is known as a solenoid re-
lay. Shown in Figure 7-3, this type of relay uses a solenoid—an electromagnetic