
Page 55 - CNC Robotics
P. 55
CNC Robotics
APPLICATION NOTE
THE L297 STEPPER MOTOR CONTROLLER
The L297 integratesa/l the control circuitry required to control bipolarand unipolarsteppermotors. Used
with a dualbridge driver such as the L298N forms a complete microprocessor-la-bipolarstepper motor
interface. Unipolar steppermotor can be driven with an L29 7plus a quad darlington array. This note de -
scribes the operation of the circuit andshows howitis used.
The L297 Stepper Motor Controller is primarily in- l297 and a speci al version ca lled L297 A. The
tendedfor use with an L29BN or l293Ebrdge driver l297Aiocorporates a step pulse doubler and is de-
in stepper motor drMng applications . signed spec ifically for flopp y-disk head positkmlrq
applications.
It rece ives control signals from the syste m'scontrol-
ler, usually a microcomputer chip, and provid es all
the necessarydrive signals for the powerstaqe.Ad- ADVA NTAGES
ditionally,it inckJdestwo PWM croooercscuits tore- The l297 + driver corrotnanon has many advanta-
gulate the current in the motor windings. ges : very few components are required (so assem-
bly costs are low, reftability high and little spa ce
With a suitable power actuator the l297 drives two
required), software development is sirrpJified and
pha se bipolar pe rmanent magn et motors, four pha-
se unipolarpermanentmagnet notorsarotcurpna- the burden on the micro is reduced. Further, the
choice of a two-ehip approach gives a high degree
se variable reluctance motors. Moreover, it handles
normal,wave driVeand half step drive modes. (This of flexibility-the l298Ncan be used on itsown for DC
is all explained in the section "Stepper Moto r Ba- motors and the l297 ca n be used with any power
stag e, ioclud ing discrete power devices (it provides
sics").
20mA drive for this purpose).
Too versions of the device are available : the regular
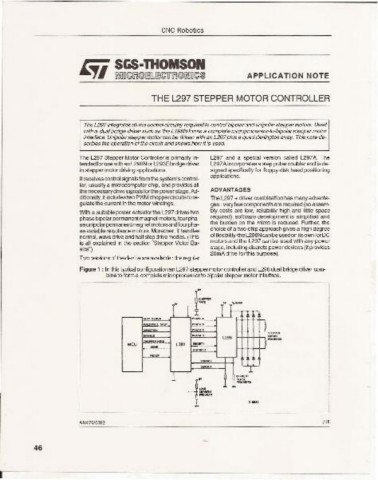
Figure 1 : In this typica l configuration an L297 stepper motor contro ller and L298 dual bridge driver com-
bine to form a compl ete microprocessor to bipo lar stepper motor intertace.
,~
0"
rfO-
r r J:
~-"--
uP' ,1.Dta
-- ~_o l
.... U"tA1l~ v~!..
-~,
_~ o
,~~
L298
~!!".!!'!~~C!.
Meu l297 ~. J
--~- - _ . -
._.
,"til""t
~.
~~
..L
1 ~ .... ".[11'I
~o~
~,-
~
'-- cu_m
_u
S- llin
AN470103:12 1118
46
r- - - - - - - - - - - - - - - - - - - - - - -