
Page 57 - CNC Robotics
P. 57
CNC Robotics
APPLICATION NOTE
STE PPER MOTOR BASICS mode.Onlyonephase isenergizedatanygivenrro-
ment (figure 4a).
There are two basic types of stepper motorin rom-
moo use: permanent rnagnetand variable reluctan- Thesecondpossibiltyisto energizebothphasesto-
ce. Permanent magnet motors are divided into gether,sothatthe rotoralwaysalignsitseltbetween
bipolarand unipolartypes. two pole positions. Called "two-phase-en"full step,
this rrode isthe normaldrive sequencefora bipolar
BIPOLAR MOTORS motor and givesthe highest torque (figure 4b).
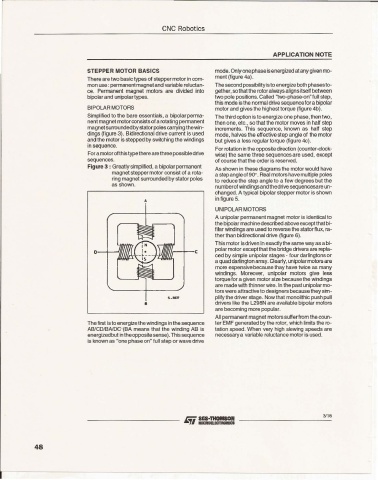
Simplified to the bare essentials, a bipolar perma- The third option isto energizeonephase,thentwo,
nentmagnetmotorconsists of arotatingpennanent thenone, etc., so that the motor moves in half step
magnetsurroundedbystatorpolescarryingthewin- increments. This sequence, known as half step
dings (figure 3). Bidirectional drive current is used mode, halves the effective step angle of the motor
and the motor is steppedby switching the windings but givesa less regular torque (figure 4c).
in sequence.
For rotationinthe opposfedirecton (counter-clock-
Foramotorofthistypetherearethreepossibledrive wise) the same three sequencesare used, except
sequences. of coursethat the order is reserved.
Figure 3 : Greatlysimplified, a bipolar permanent As shown in these diagramsthe motor would have
magnet stepper motor consistof a rota- a stepangleof 900. Real rrotorshavemultiplepoles
ring mag net surrounded by stator poles
to reduce the step angle to a few degrees but the
as shown. numberof 'Nindingsandthedrivesequencesareun-
changed. A typical bipolarstepper motor is shown
• in figure 5.
UNIPOLAR MOTORS
A unipolar permanent magnet motor is identical to
the bipolar machinedescri:>ed aboveexceptthatbl-
filar windingsare used to reversethe stator flux, ra-
ther thanbidirectionaldrive (figure 6).
This motor isdrivenin exaetlythe samewayas a bi-
D-t---"'"1/11 'Ir-+ - c polar motor exceptthat the bri<:lge drivers are repla-
ced by sirrple unipolar stages - four darlingtonsor
a quaddarlingtonarray.Clearly,unipolarmotorsare
more expensivebecausethay have twice as many
windings. Moreover, unipolar motors give less
torque for a given motor size because the windings
are made withthinnerwire. In the pastunipolarmo-
tors wereattractive to designers becausethey sim-
plify the driverstage. Nowthat monolithicpushpull
• drivers like the l298N are available bipolar motors
are becomingmore popular.
Allpermanentmagnet rrotorssufferfrom thecoun-
The firstisla energizethewindingsinthe sequence ter EMF generatedby the rotor, whichfirrits the ro-
ABlCOtBNDC (SA means that the wiming AS is teton speed. When very high slewing speeds are
energizedbutintheoppositesense).Thissequence necessarya variablereluctancemotor is used.
is known as "one phase annfull step or wave drive
3116
48