
Page 342 - Cam Design Handbook
P. 342
THB11 9/19/03 7:33 PM Page 330
330 CAM DESIGN HANDBOOK
x
x f
m x f M eq
F
l 1 F
l 2
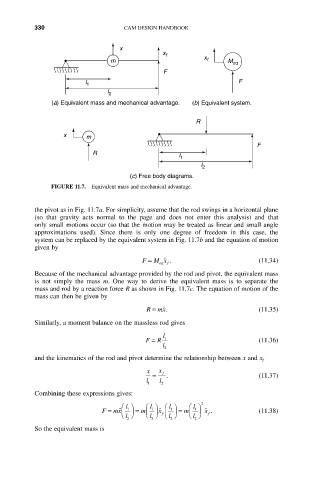
(a) Equivalent mass and mechanical advantage. (b) Equivalent system.
R
x m
F
R
l 1
l 2
(c) Free body diagrams.
FIGURE 11.7. Equivalent mass and mechanical advantage.
the pivot as in Fig. 11.7a. For simplicity, assume that the rod swings in a horizontal plane
(so that gravity acts normal to the page and does not enter this analysis) and that
only small motions occur (so that the motion may be treated as linear and small angle
approximations used). Since there is only one degree of freedom in this case, the
system can be replaced by the equivalent system in Fig. 11.7b and the equation of motion
given by
F = M x ˙˙ . (11.34)
eq f
Because of the mechanical advantage provided by the rod and pivot, the equivalent mass
is not simply the mass m. One way to derive the equivalent mass is to separate the
mass and rod by a reaction force R as shown in Fig. 11.7c. The equation of motion of the
mass can then be given by
R = ˙˙. (11.35)
mx
Similarly, a moment balance on the massless rod gives
l
F = R 1 (11.36)
l
2
and the kinematics of the rod and pivot determine the relationship between x and x f
x x f
= . (11.37)
l 1 l 2
Combining these expressions gives:
2
l Ê ˆ l Ê ˆ l Ê ˆ l Ê ˆ
F = ˙˙ 1 mÁ ˜ ˙˙ x Á ˜ = mÁ ˜ ˙˙ . (11.38)
1
1
1
x
mxÁ ˜ =
l Ë ¯ l Ë ¯ f l Ë ¯ l Ë ¯ f
2 2 2 2
So the equivalent mass is