
Page 360 - Concise Encyclopedia of Robotics
P. 360
Work Environment
plane.Others are cylindrical; still others are spherical.Some work envelopes
have complicated shapes.
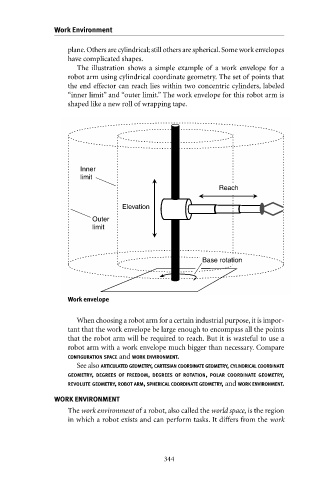
The illustration shows a simple example of a work envelope for a
robot arm using cylindrical coordinate geometry. The set of points that
the end effector can reach lies within two concentric cylinders, labeled
“inner limit” and “outer limit.” The work envelope for this robot arm is
shaped like a new roll of wrapping tape.
Inner
limit
Reach
Elevation
Outer
limit
Base rotation
Work envelope
When choosing a robot arm for a certain industrial purpose,it is impor-
tant that the work envelope be large enough to encompass all the points
that the robot arm will be required to reach. But it is wasteful to use a
robot arm with a work envelope much bigger than necessary. Compare
CONFIGURATION SPACE and WORK ENVIRONMENT.
See also ARTICULATED GEOMETRY, CARTESIAN COORDINATE GEOMETRY, CYLINDRICAL COORDINATE
GEOMETRY, DEGREES OF FREEDOM, DEGREES OF ROTATION, POLAR COORDINATE GEOMETRY,
REVOLUTE GEOMETRY, ROBOT ARM, SPHERICAL COORDINATE GEOMETRY, and WORK ENVIRONMENT.
WORK ENVIRONMENT
The work environment of a robot, also called the world space, is the region
in which a robot exists and can perform tasks. It differs from the work
