
Page 362 - Concise Encyclopedia of Robotics
P. 362
Wrist-Force Sensing
To robot
controller
Up
Sensor
In Left
Out
Right
Robot arm Down
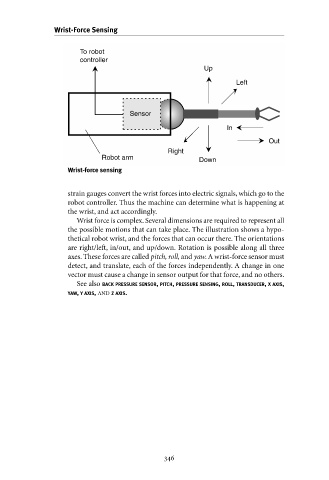
Wrist-force sensing
strain gauges convert the wrist forces into electric signals, which go to the
robot controller. Thus the machine can determine what is happening at
the wrist, and act accordingly.
Wrist force is complex. Several dimensions are required to represent all
the possible motions that can take place. The illustration shows a hypo-
thetical robot wrist, and the forces that can occur there. The orientations
are right/left, in/out, and up/down. Rotation is possible along all three
axes. These forces are called pitch, roll, and yaw. A wrist-force sensor must
detect, and translate, each of the forces independently. A change in one
vector must cause a change in sensor output for that force, and no others.
See also BACK PRESSURE SENSOR, PITCH, PRESSURE SENSING, ROLL, TRANSDUCER, X AXIS,
YAW, Y AXIS, AND Z AXIS.
