
Page 82 - Concise Encyclopedia of Robotics
P. 82
Deliberation
J3
Y = 75 degrees Z = 51 degrees
J2
J1
X =
39 degrees
X + Y + Z = 165 degrees
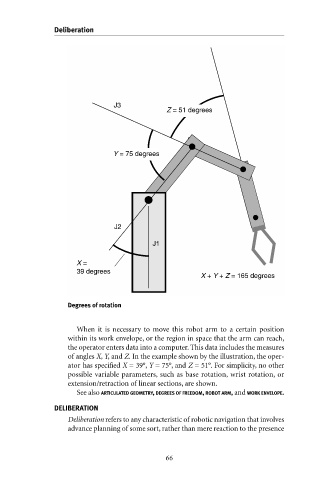
Degrees of rotation
When it is necessary to move this robot arm to a certain position
within its work envelope, or the region in space that the arm can reach,
the operator enters data into a computer. This data includes the measures
of angles X, Y, and Z. In the example shown by the illustration, the oper-
ator has specified X = 39°, Y = 75°, and Z = 51°. For simplicity, no other
possible variable parameters, such as base rotation, wrist rotation, or
extension/retraction of linear sections, are shown.
See also ARTICULATED GEOMETRY, DEGREES OF FREEDOM, ROBOT ARM, and WORK ENVELOPE.
DELIBERATION
Deliberation refers to any characteristic of robotic navigation that involves
advance planning of some sort, rather than mere reaction to the presence
