
Page 180 - Control Theory in Biomedical Engineering
P. 180
Medical robotics 165
(A)
(B)
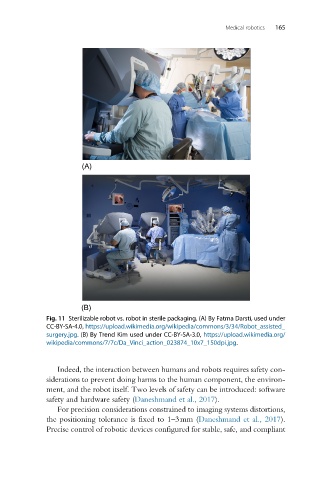
Fig. 11 Sterilizable robot vs. robot in sterile packaging. (A) By Fatma Darsti, used under
CC-BY-SA-4.0, https://upload.wikimedia.org/wikipedia/commons/3/34/Robot_assisted_
surgery.jpg. (B) By Trend Kim used under CC-BY-SA-3.0, https://upload.wikimedia.org/
wikipedia/commons/7/7c/Da_Vinci_action_023874_10x7_150dpi.jpg.
Indeed, the interaction between humans and robots requires safety con-
siderations to prevent doing harms to the human component, the environ-
ment, and the robot itself. Two levels of safety can be introduced: software
safety and hardware safety (Daneshmand et al., 2017).
For precision considerations constrained to imaging systems distortions,
the positioning tolerance is fixed to 1–3mm (Daneshmand et al., 2017).
Precise control of robotic devices configured for stable, safe, and compliant