
Page 335 - Control Theory in Biomedical Engineering
P. 335
Initial 15least, (with risk 105most) and Verification and controls Risk Risk Severity Likelihood validation measures mitigation to applications Using design of Revision 3 3 1 of angle the measure to Motorization bending efficient ensure wires Entangled driven cable efficient prevent mechanism t
to endoscopy/ and lost tear results obtained endoscopy results obtained endoscopy
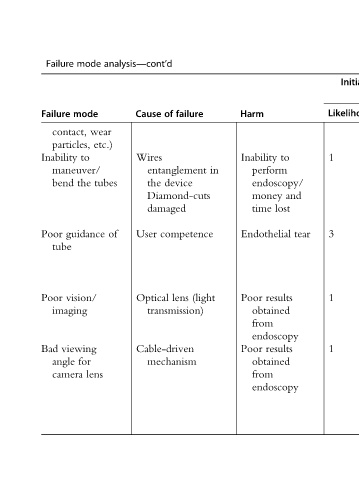
Harm Inability perform money time Endothelial Poor from Poor from
in (light
failure of entanglement device Diamond-cuts damaged competence lens transmission) Cable-driven mechanism
analysis—cont’d Cause Wires the User Optical
mode mode wear etc.) to maneuver/ tubes the of guidance vision/ viewing for lens
Failure Failure contact, particles, Inability bend Poor tube Poor imaging Bad angle camera