
Page 336 - Control Theory in Biomedical Engineering
P. 336
of
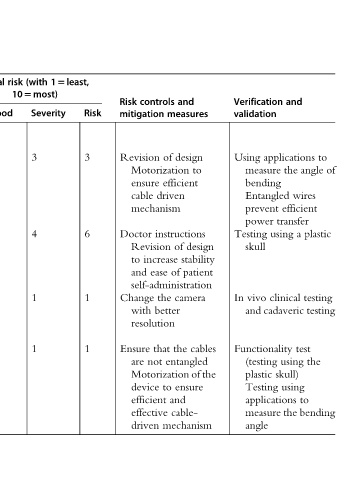
to angle plastic testing testing the bending
and applications the wires efficient transfer a using clinical cadaveric test using skull) using to the
Verification validation Using measure bending Entangled prevent power Testing skull vivo In and Functionality (testing plastic Testing applications measure angle
and measures design to efficient driven instructions design of stability patient of self-administration camera cables the entangled Motorization of the ensure and cable- mechanism
controls mitigation of Motorization ensure cable mechanism Revision increase ease the better resolution that not to device efficient effective driven
Risk Revision Doctor to and Change with Ensure are
Risk 3 6 1 1
15least,
(with 105most) Severity 3 4 1 1
risk
Initial Likelihood 1 3 1 1
to endoscopy/ and lost tear results obtained endoscopy results obtained endoscopy
Harm Inability perform money time Endothelial Poor from Poor from
in (light
failure of entanglement device Diamond-cuts damaged competence lens transmission) Cable-driven mechanism
analysis—cont’d Cause Wires the User Optical
mode mode wear etc.) to maneuver/ tubes the of guidance vision/ viewing for lens
Failure Failure contact, particles, Inability bend Poor tube Poor imaging Bad angle camera