
Page 37 - Control Theory in Biomedical Engineering
P. 37
24 Control theory in biomedical engineering
Fig. 18 Closed loop related to the control process.
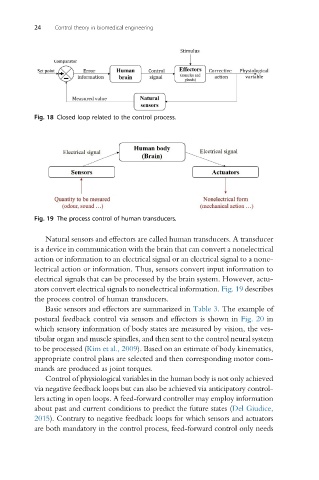
Fig. 19 The process control of human transducers.
Natural sensors and effectors are called human transducers. A transducer
is a device in communication with the brain that can convert a nonelectrical
action or information to an electrical signal or an electrical signal to a none-
lectrical action or information. Thus, sensors convert input information to
electrical signals that can be processed by the brain system. However, actu-
ators convert electrical signals to nonelectrical information. Fig. 19 describes
the process control of human transducers.
Basic sensors and effectors are summarized in Table 3. The example of
postural feedback control via sensors and effectors is shown in Fig. 20 in
which sensory information of body states are measured by vision, the ves-
tibular organ and muscle spindles, and then sent to the control neural system
to be processed (Kim et al., 2009). Based on an estimate of body kinematics,
appropriate control plans are selected and then corresponding motor com-
mands are produced as joint torques.
Control of physiological variables in the human body is not only achieved
via negative feedback loops but can also be achieved via anticipatory control-
lers acting in open loops. A feed-forward controller may employ information
about past and current conditions to predict the future states (Del Giudice,
2015). Contrary to negative feedback loops for which sensors and actuators
are both mandatory in the control process, feed-forward control only needs