
Page 108 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 108
Communications and Control
802.11 802.11 Ethernet
Lap Top
Ethernet Ethernet Master Computer Camera
Access Point Radio
RS-232 RS-232 Slave 2 Xducers
(Sonar)
Ethernet Access Point Slave 3 Ranger
802.11
Laser
Ethernet
(Lidar)
Host Mobile Robot
Computer
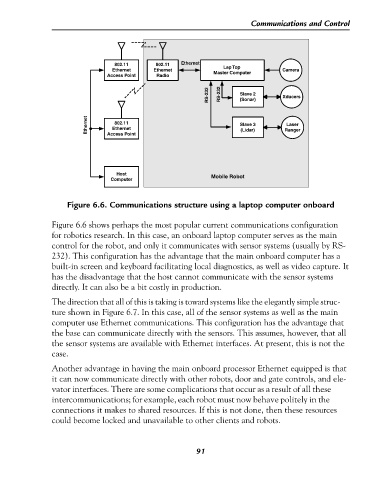
Figure 6.6. Communications structure using a laptop computer onboard
Figure 6.6 shows perhaps the most popular current communications configuration
for robotics research. In this case, an onboard laptop computer serves as the main
control for the robot, and only it communicates with sensor systems (usually by RS-
232). This configuration has the advantage that the main onboard computer has a
built-in screen and keyboard facilitating local diagnostics, as well as video capture. It
has the disadvantage that the host cannot communicate with the sensor systems
directly. It can also be a bit costly in production.
The direction that all of this is taking is toward systems like the elegantly simple struc-
ture shown in Figure 6.7. In this case, all of the sensor systems as well as the main
computer use Ethernet communications. This configuration has the advantage that
the base can communicate directly with the sensors. This assumes, however, that all
the sensor systems are available with Ethernet interfaces. At present, this is not the
case.
Another advantage in having the main onboard processor Ethernet equipped is that
it can now communicate directly with other robots, door and gate controls, and ele-
vator interfaces. There are some complications that occur as a result of all these
intercommunications; for example, each robot must now behave politely in the
connections it makes to shared resources. If this is not done, then these resources
could become locked and unavailable to other clients and robots.
91