
Page 110 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 110
Communications and Control
Analog
Video
Reciever
Analog
Video Camera
Tranmitter
Analog
Video
Reciever
Slave 2
(Sonar) Xducers
Video
Switch
Supervisor Slave 3 Laser
Interface Monitor (Lidar) Ranger
Box
RS-232 RS-232 Control Slave 1
RS-232 Base Station Modem RS-232 Mobile Base
Radio
Radio
Modem
Master
Mobile Base
Mobile Robot
Host Radio
Computer Repeater/s
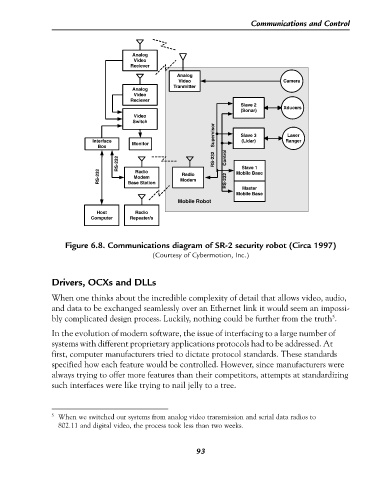
Figure 6.8. Communications diagram of SR-2 security robot (Circa 1997)
(Courtesy of Cybermotion, Inc.)
Drivers, OCXs and DLLs
When one thinks about the incredible complexity of detail that allows video, audio,
and data to be exchanged seamlessly over an Ethernet link it would seem an impossi-
5
bly complicated design process. Luckily, nothing could be further from the truth .
In the evolution of modern software, the issue of interfacing to a large number of
systems with different proprietary applications protocols had to be addressed. At
first, computer manufacturers tried to dictate protocol standards. These standards
specified how each feature would be controlled. However, since manufacturers were
always trying to offer more features than their competitors, attempts at standardizing
such interfaces were like trying to nail jelly to a tree.
5 When we switched our systems from analog video transmission and serial data radios to
802.11 and digital video, the process took less than two weeks.
93