
Page 130 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 130
Basic Navigation Philosophies
is oblong, then one has to decide which dimension to use to grow the obstacles. If
the width is less than the length (the usual case), then it may be tempting to use the
width as the growth dimension. If this is done, however, then the robot may not be
able to turn around in some tighter places.
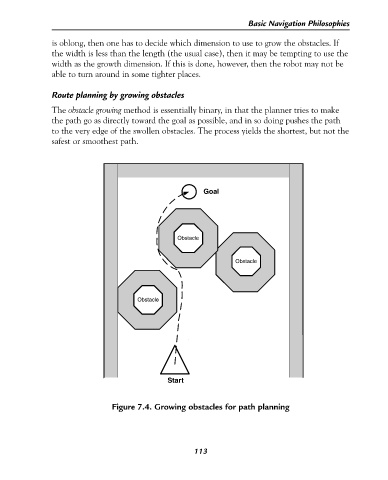
Route planning by growing obstacles
The obstacle growing method is essentially binary, in that the planner tries to make
the path go as directly toward the goal as possible, and in so doing pushes the path
to the very edge of the swollen obstacles. The process yields the shortest, but not the
safest or smoothest path.
Goal
Obstacle
Obstacle
Obstacle
Start
Figure 7.4. Growing obstacles for path planning
113