
Page 163 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 163
Chapter 11
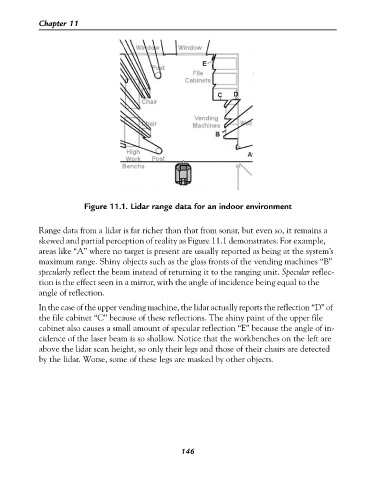
Figure 11.1. Lidar range data for an indoor environment
Range data from a lidar is far richer than that from sonar, but even so, it remains a
skewed and partial perception of reality as Figure 11.1 demonstrates. For example,
areas like “A” where no target is present are usually reported as being at the system’s
maximum range. Shiny objects such as the glass fronts of the vending machines “B”
specularly reflect the beam instead of returning it to the ranging unit. Specular reflec-
tion is the effect seen in a mirror, with the angle of incidence being equal to the
angle of reflection.
In the case of the upper vending machine, the lidar actually reports the reflection “D” of
the file cabinet “C” because of these reflections. The shiny paint of the upper file
cabinet also causes a small amount of specular reflection “E” because the angle of in-
cidence of the laser beam is so shallow. Notice that the workbenches on the left are
above the lidar scan height, so only their legs and those of their chairs are detected
by the lidar. Worse, some of these legs are masked by other objects.
146