
Page 178 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 178
Hard Navigation vs. Fuzzy Navigation
B
B'
Φ
A -Φ
Initial Position Estimate
A'
Long. Error E x
A''
Lat. Error E y
Implied Position and Azimuth
for Full Correction
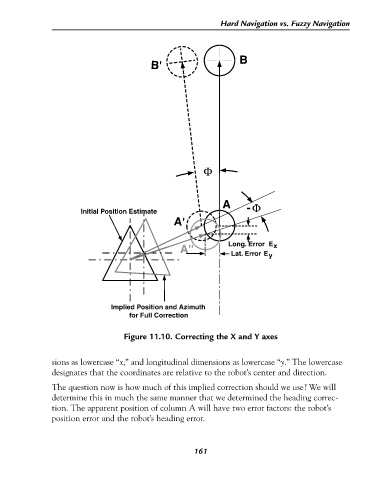
Figure 11.10. Correcting the X and Y axes
sions as lowercase “x,” and longitudinal dimensions as lowercase “y.” The lowercase
designates that the coordinates are relative to the robot’s center and direction.
The question now is how much of this implied correction should we use? We will
determine this in much the same manner that we determined the heading correc-
tion. The apparent position of column A will have two error factors: the robot’s
position error and the robot’s heading error.
161