
Page 175 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 175
Chapter 11
The robot’s calculated uncertainty is the metric against which implied corrections are
compared. The process is then one of simple trapezoidal fuzzy logic as described in
Chapter 4.
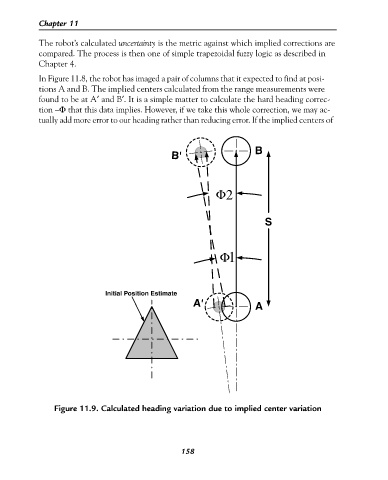
In Figure 11.8, the robot has imaged a pair of columns that it expected to find at posi-
tions A and B. The implied centers calculated from the range measurements were
found to be at A′ and B′. It is a simple matter to calculate the hard heading correc-
tion –Φ that this data implies. However, if we take this whole correction, we may ac-
tually add more error to our heading rather than reducing error. If the implied centers of
B
B'
Φ 2
S
Φ 1
Initial Position Estimate
A' A
Figure 11.9. Calculated heading variation due to implied center variation
158